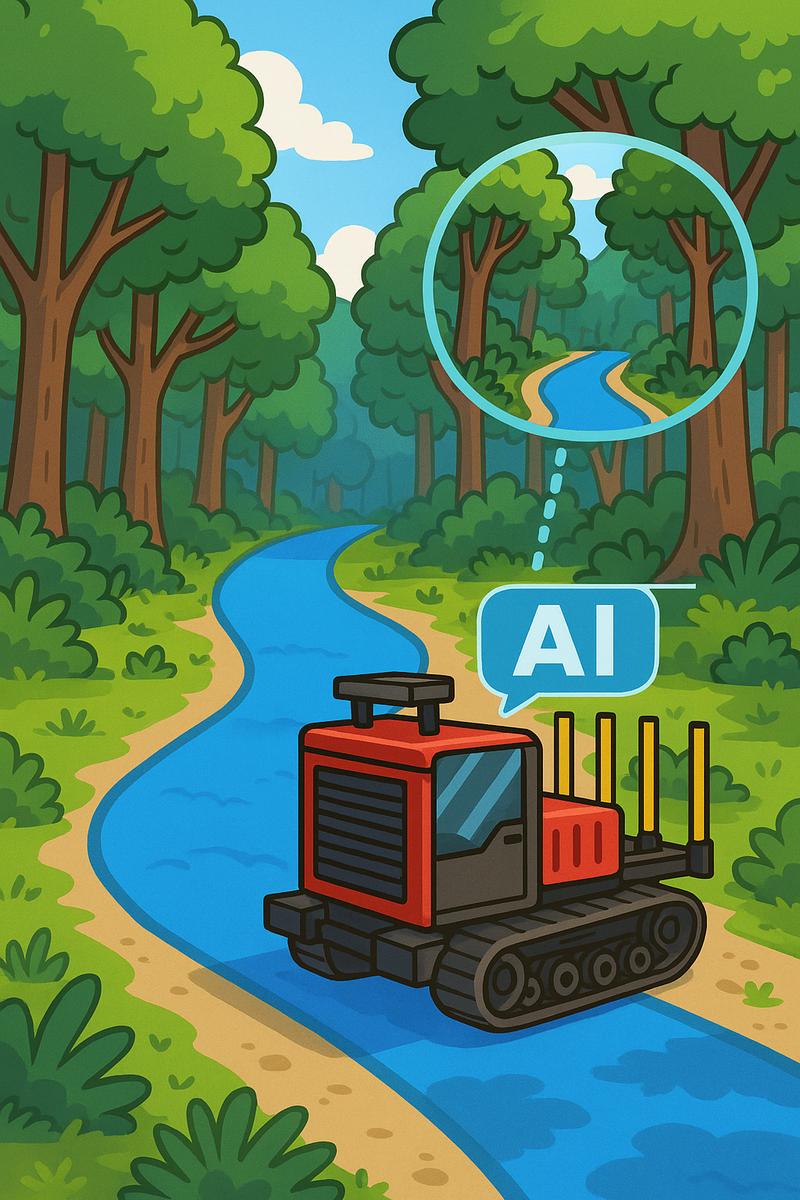
산림청 국립산림과학원은 AI 기술을 접목한 지능형 산림작업 로봇을 개발하고, 현장 적용성을 높이기 위한 연구를 진행 중이라고 밝혔다.
이번에 개발된 로봇은 위성항법시스템(GNSS)과 관성항법시스템(INS)을 결합한 통합 항법시스템을 기반으로 하며, AI 기반 딥러닝 기술을 탑재해 산림 환경 내 주행로를 스스로 인식하고 자율주행할 수 있다. 비전 센서가 수집한 주행로 영상 정보를 AI가 학습하여 다양한 임도 환경에서도 정확하게 주행 경로를 탐지하는 성과를 보였다.
특히 탑재형 AI 기술은 독립 장치에서 AI 모델을 자체 수행해 네트워크나 클라우드에 부담을 주지 않으면서 산림작업 현장 로봇과 기계에 적용할 수 있다. 이에 따라 무인 산림작업 로봇뿐 아니라 기존 임업용 기계 장비에도 쉽게 장착 가능하다.
국립산림과학원 산림기술경영연구소 오재헌 박사는 “이번 기술은 여러 센서 융합과 함께 안전하고 효율적인 산림작업 실현에 기여할 것”이라고 말했다.
이 기술은 임도 주행 영상과 AI 인식 결과를 비교한 시험에서도 직선, 곡선, 횡단배수로 및 그림자가 있는 복잡한 환경에서도 정확한 주행로 인식을 확인했다.
 AI 혁신 물결: xAI의 세계 모델, OpenAI GPT-5 업데이트, Hugging Face 오픈소스 NLP 모델 출시
2025년 말, AI 분야에서 주요 기업들의 연이은 발표가 이어지며 기술 발전의 속도가 가속화되고 있다. xAI의 로보틱스용 물리 세계 이해 모델 개발, OpenAI의 GPT-5 시리즈 업데이트, 그리고 Hugging Face의 맞춤형 NLP 오픈소스 모델 출시가 그 중심에 있다. 이러한 발전은 로보틱스, 자연어 처리, 콘텐츠 생성 등 다양한 영역에서 실용적 적용을 촉진할 ...
AI 혁신 물결: xAI의 세계 모델, OpenAI GPT-5 업데이트, Hugging Face 오픈소스 NLP 모델 출시
2025년 말, AI 분야에서 주요 기업들의 연이은 발표가 이어지며 기술 발전의 속도가 가속화되고 있다. xAI의 로보틱스용 물리 세계 이해 모델 개발, OpenAI의 GPT-5 시리즈 업데이트, 그리고 Hugging Face의 맞춤형 NLP 오픈소스 모델 출시가 그 중심에 있다. 이러한 발전은 로보틱스, 자연어 처리, 콘텐츠 생성 등 다양한 영역에서 실용적 적용을 촉진할 ...
 국방부장관, 계룡대서 각 군 대비태세 점검…군구조 개편 논의
국방부장관, 계룡대서 각 군 대비태세 점검…군구조 개편 논의
 [손현식 칼럼] 270만 외국인 시대, ‘함께 사는 법’은 배운 적이 없다
[손현식 칼럼] 270만 외국인 시대, ‘함께 사는 법’은 배운 적이 없다
 할리우드 배우노조, 스튜디오 측에 새 반대 제안 테이블에 올리다
할리우드 배우노조, 스튜디오 측에 새 반대 제안 테이블에 올리다
 '내란전담재판부' 의무 설치=사법 독립의 종언이자 입법 독재
'내란전담재판부' 의무 설치=사법 독립의 종언이자 입법 독재
 하나님의 축복 속에서 시작된 사랑… 특별한 결혼의 여정
하나님의 축복 속에서 시작된 사랑… 특별한 결혼의 여정

 목록
목록









